

 发布时间:2020-04-07
发布时间:2020-04-07  阅读次数:2058次
阅读次数:2058次
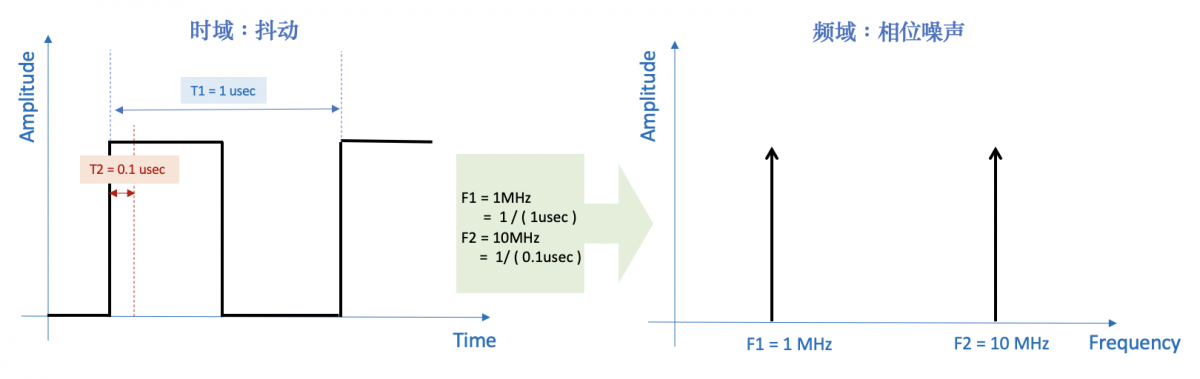
晶振的短期频率稳定度由噪声引起导致的频率不稳定。其中,电噪声是根本原因。电噪声包括热噪声,散弹噪声,以及闪变噪声。导体的无规律热运动带来热噪声。从频域来看,对应的参数是相位噪声(Phase Noise);从时域来看,对应的参数是抖动(Jitter)。时间和频域之间的关系互为倒数Time=1/Frequency。
抖动Jitter
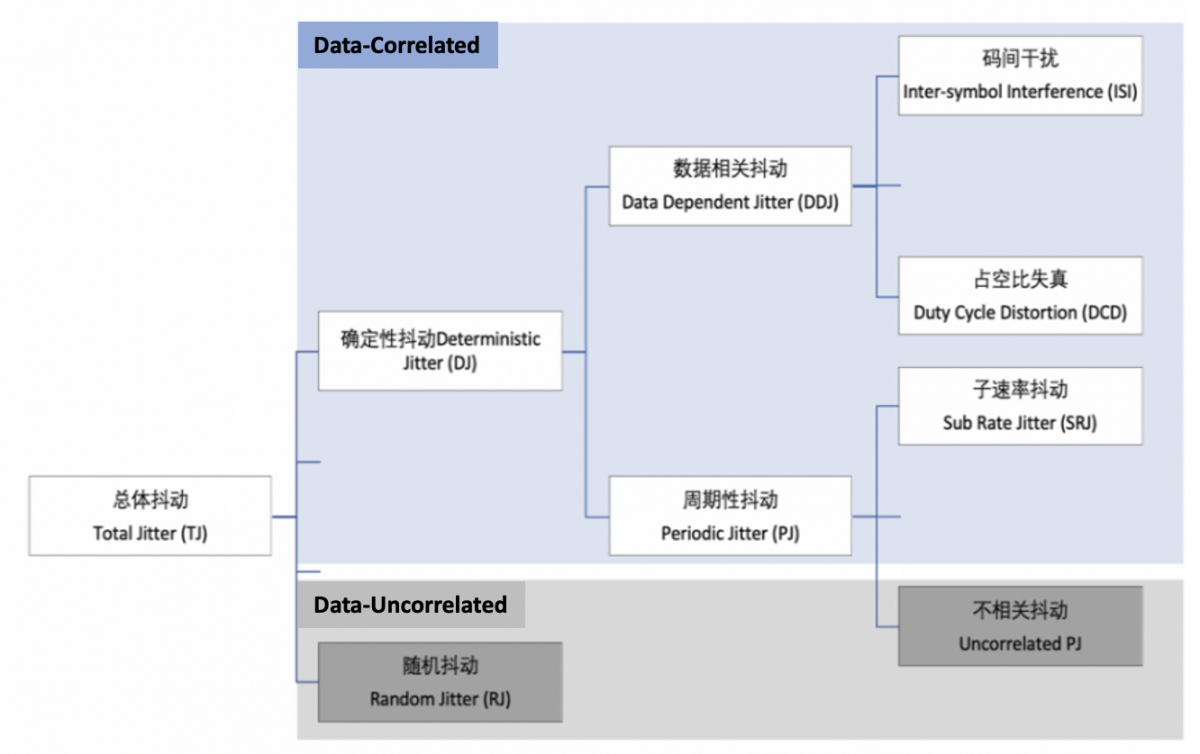
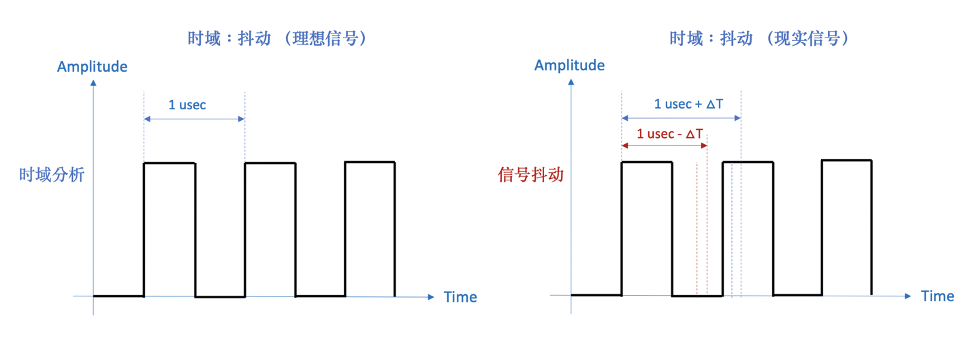
抖动是信号偏离理想位置的程度,表示的是时域特征。单位一般用pS,fS表示。抖动分为确定性和随机性抖动。确定性抖动是可识别的干扰信号造成的,这种抖动的幅度有限。总抖动的构成如下:
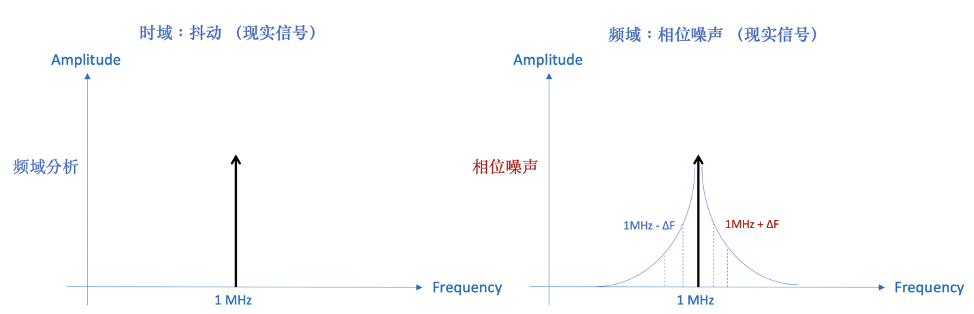
在时域中,噪声是非周期的函数。而傅里叶分析可以把此函数分解成多个正弦周期的函数,如下。
相位噪声Phase Noise
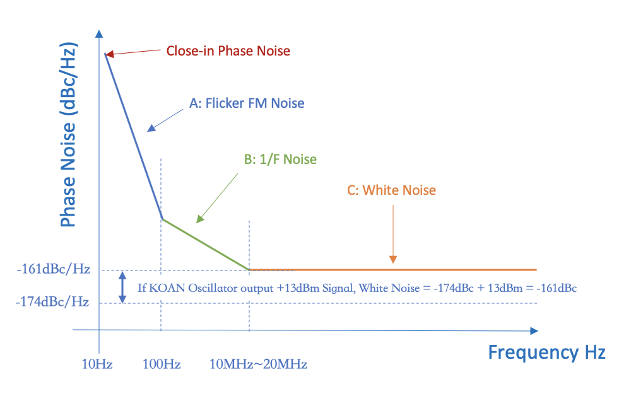
若没有相位噪声,振荡器的整个功率都集中在f0(10MHz为例),功率频谱就是一条以f0为中心的直线,且信号为纯正的正弦波。但是任何信号都有不稳定性,从而产生了边带sideband。相位噪声通常定义为一个振荡器在某一偏移频率fm处1Hz宽带内的单边信号功率和信号的总功率比值,单位是dBc/Hz.通常表示为dBc/Hz@fm。
相位噪声的形成因素主要三方面:
· A区主要是晶体Q值来决定。高频晶体有很高的近载波相位噪声(Close-in Phase Noise), 因为他们有低的Q值和更宽的边带。
· B区主要是晶体外围电路(包括IC)来决定。
· C区主要是信号输出(白噪声)来决定。
抖动对系统稳定度的影响
低噪声KOAN晶振在精密电子仪器,无线电定位,高速目标跟踪和宇航通信等领域十分重要,下面一组图将说明抖动对系统稳定度的影响。
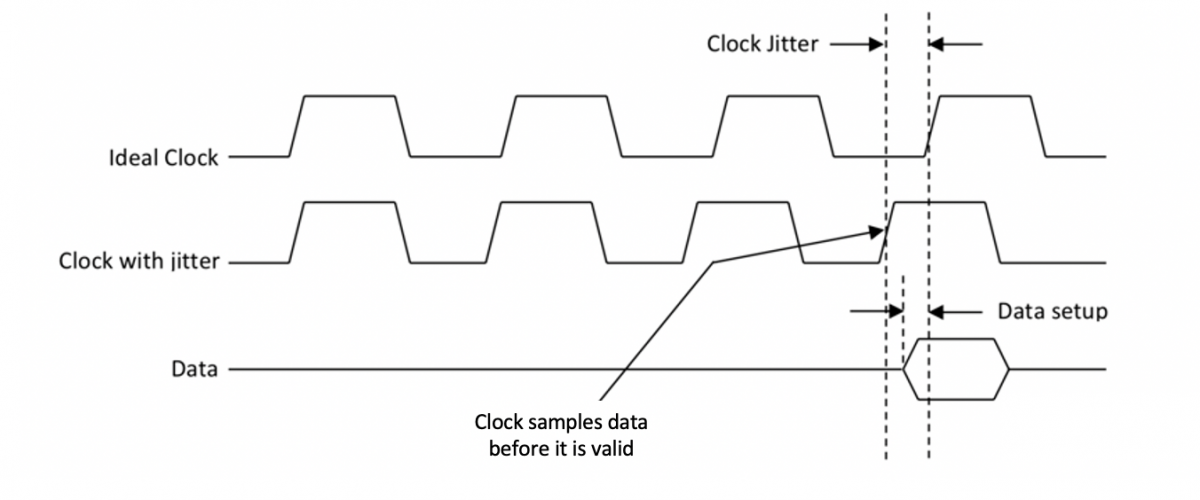
假设有一个微处理器系统,其中处理器的时钟上升前需要1ns的数据设置。如果时钟的周期抖动为-1.5ns,那么时钟的上升沿可能发生在有效期之前。因此微处理器将显示不正确的数据:
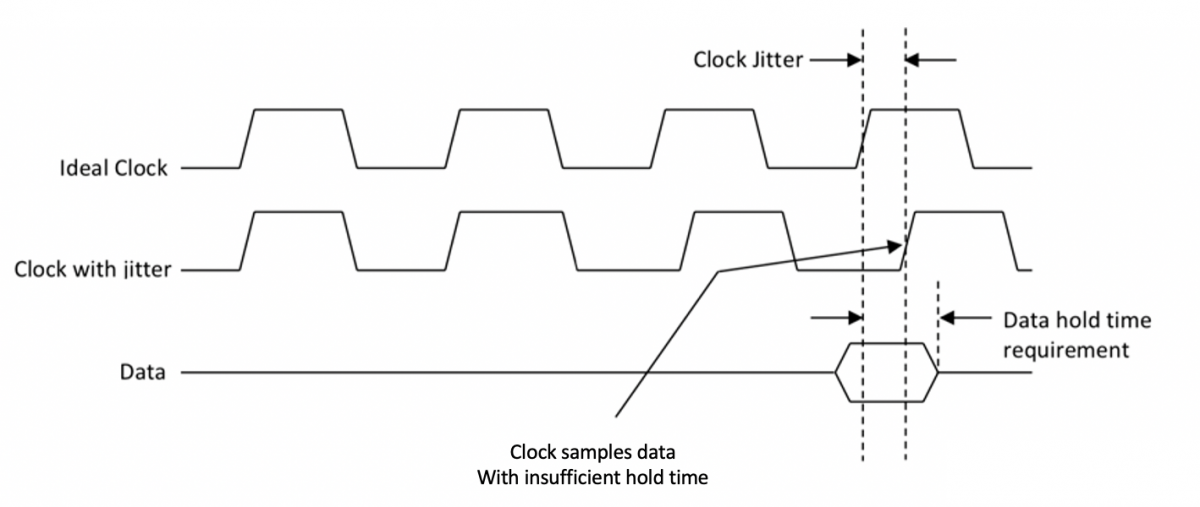
假设另一个微处理器系统的数据要求保持时间为2ns,但是时钟抖动为±1.5ns,那么数据保持时间实际上减少到0.5ns,因此微处理器也将显示不正确的数据
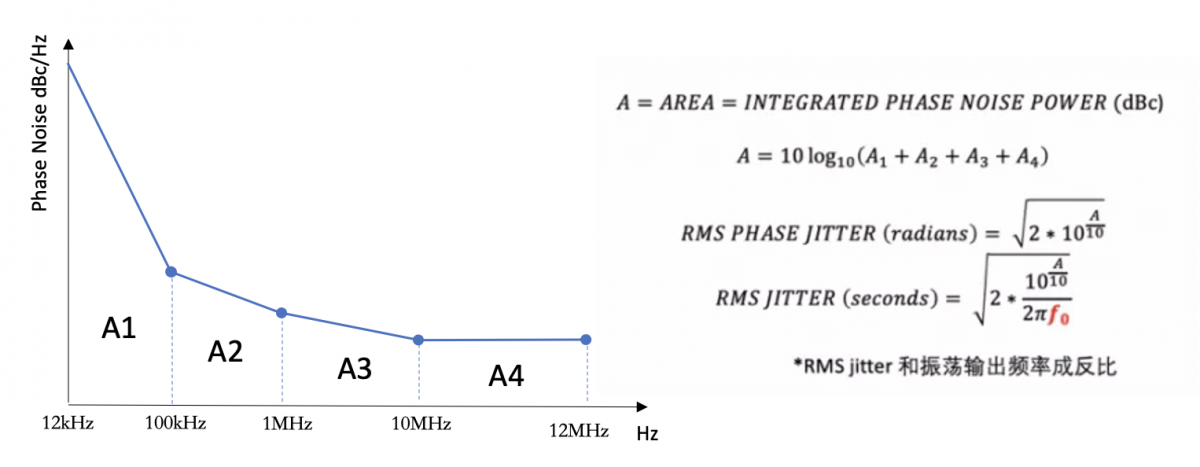
相位噪声转化为RMS Jitter
RMS Jitter是对相位噪声图的弧面的面积做积分的计算。计算公式如下。最后的RMS Jitter值与振荡输出频率成反比。
KOAN推出低相噪抖动系列晶振
第一步: 选中‘相噪抖动’特种晶振类别。

第二步: 进行筛选

第三步: 进入参数选择,您可以勾选参数,右侧的规格书以便为您提供参考。复制生成的产品代号后,您可以和KOAN客服在线沟通。




地址:北京市海淀区知春路豪景大厦B座802室
销售:010-6210 1903/010-8262 3568
邮箱:sales@koan-xtal.com
地址:上海市北京东路668号G435室
电话:021-53082075
传真:021-53082075
邮箱:shzwyou_88@163.com


